| | QuIRK Multibody Dynamics Esempio pendolo piano |  |
|
|
| Autore | Messaggio |
|---|
bestlin
Numero di messaggi : 16
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : nicola angelino
Data d'iscrizione : 24.05.12
| Titolo: QuIRK Multibody Dynamics Esempio pendolo piano  Sab Mar 12, 2016 4:37 pm Sab Mar 12, 2016 4:37 pm | |
| Buona Pomeriggio
Sono riuscito a recuperare un listato matlab che ci permette di costruire un modello di un pendolo piano che oscilla sotto l'azione del campo gravitazionale, utilizzando il QuIRK è possibile risolvere le equazioni del moto di questo sistema, e di tanti altri. Inoltre attraverso delle animazioni esso ci permette di estrarre informazioni sull'evoluzione dello stato energetico del sistema. Inoltre il metodo QuIRK per determinare il moto di un sistema vincolato utilizza il metodo di udwadia-kalaba.
La lista dei comandi è la seguente:
clear all
close all
clc
% Construct bodies
base = body([0 0 0.5], [0 0 0 1], 'shape', 'cube', ...
'size', '2x2x1', 'color', 'm');
rod = body([0 4.9*sind(30) -4.9*cosd(30)], ...
[sind(30/2) 0 0 cosd(30/2)], 'shape', 'box', 'mass', 0.1, ...
'size', '0.1x0.1x9.8', 'color', 'b');
bob = body([0 9.8*sind(30) -9.8*cosd(30)], ...
[sind(30/2) 0 0 cosd(30/2)], 'shape', 'box', ...
'size', '1x1x1', 'color', 'b');
% Create joints
grnd = joint(base, 'ground');
fixbob = joint(rod, bob, 'pt1', [0 0 -4.9], 'pt2', [0 0 0], ...
'type', 'fix');
hinge = joint(base, rod, 'pt1', [0 0 -0.5], 'pt2', [0 0 4.9], ...
'type', 'hinge', 'axis', [1 0 0]);
% Build multibody system
mb = mBody(base, rod, bob, grnd, fixbob, hinge, ...
'U', @(b)( 9.8*b.mass*b.pos(3) ), 'damping', 0.1 ); %@(x,t)( 9.8*x(3) )
% Solve system
solve(mb, [0 100], 'tidy', true, 'odeopts', odeset('outputfcn', @odeplot));
% Animate results
figure(1)
animate(mb, 'lit', true, 'axis', [-5 5 -5 5 -10 1])
% Find equilibrium position
figure(2)
x0 = mb.findeq('mode', 'f');
mb.draw('state', x0, 'lit', true, 'snap', true)
title('Pendulum Equilibrium')
| |
|
| | |
SN92
Numero di messaggi : 11
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : Sergio Nappo
Data d'iscrizione : 03.04.15
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano Sab Mar 12, 2016 4:45 pm | |
| Buon pomeriggio bestlin, anzitutto grazie per aver condiviso questa lista di comandi, però cercando di far partire questo listato in matlab mi ha dato questo errore:
Undefined function 'body' for input arguments of type 'double'.
Vorrei sapere se magari anche a te risulta un errore simile, o se è solo un problema della mia versione di matlab.
Grazie | |
|
| | |
bestlin
Numero di messaggi : 16
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : nicola angelino
Data d'iscrizione : 24.05.12
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano Sab Mar 12, 2016 4:49 pm | |
| ciao SN92 io ho la versione R2015a una delle ultime tu?
| |
|
| | |
SN92
Numero di messaggi : 11
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : Sergio Nappo
Data d'iscrizione : 03.04.15
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano Sab Mar 12, 2016 4:53 pm | |
| bestlin io ho la versione R2013b, quindi meno recente della tua, è probabile che sia questo il problema. | |
|
| | |
bestlin
Numero di messaggi : 16
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : nicola angelino
Data d'iscrizione : 24.05.12
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano Sab Mar 12, 2016 4:57 pm | |
| SN92 non credo sia un problema di versione, forse ho implementato qualche Package | |
|
| | |
SN92
Numero di messaggi : 11
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : Sergio Nappo
Data d'iscrizione : 03.04.15
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano Sab Mar 12, 2016 5:01 pm | |
| bestlin magari sai come poter implementare questi package per la mia versione? | |
|
| | |
bestlin
Numero di messaggi : 16
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : nicola angelino
Data d'iscrizione : 24.05.12
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano Sab Mar 12, 2016 5:05 pm | |
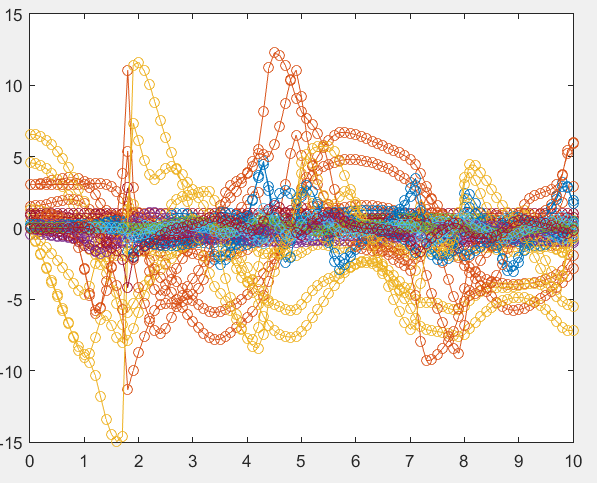
| ti posto i risultati che ho ricavato da matlab  | |
|
| | |
bestlin
Numero di messaggi : 16
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : nicola angelino
Data d'iscrizione : 24.05.12
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano Sab Mar 12, 2016 5:08 pm | |
| anche se non riesco a far partire l'animazione...
SN92 credo che la lista che ti ho dato da sola sia insufficiente, ora carico tutti i file necessari
| |
|
| | |
SN92
Numero di messaggi : 11
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : Sergio Nappo
Data d'iscrizione : 03.04.15
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano Sab Mar 12, 2016 5:10 pm | |
| Grazie aspetto un tuo riscontro, mi sembra tutto molto interessante  | |
|
| | |
bestlin
Numero di messaggi : 16
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : nicola angelino
Data d'iscrizione : 24.05.12
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano Sab Mar 12, 2016 5:19 pm | |
| Ciao SN92 ho caricato in web una file zip di cui ti posto il link, dopo averlo scaricato ed estratto, apri direttamente da matlab il file denominato pendolo
https://mega.nz/#!dBB0GD5C | |
|
| | |
SN92
Numero di messaggi : 11
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : Sergio Nappo
Data d'iscrizione : 03.04.15
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano Sab Mar 12, 2016 5:21 pm | |
| Bestlin ti ringrazio, però non mi fa aprire il file perchè mi chiede una chiave di decriptazione. | |
|
| | |
bestlin
Numero di messaggi : 16
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : nicola angelino
Data d'iscrizione : 24.05.12
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano Sab Mar 12, 2016 5:22 pm | |
| scusami SN92 sono proprio sbadato, eccola
!xb3kXkXfWp9yiLlbcdJZKqevIFKoXqQjTVw-FnEFXpc | |
|
| | |
SN92
Numero di messaggi : 11
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : Sergio Nappo
Data d'iscrizione : 03.04.15
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano Sab Mar 12, 2016 5:51 pm | |
| bestlin grazie per questi file, tuttavia riscontro ancora un problema che spero di riuscire a risolvere, magari vediamo se qualcuno avrà modo di verificare il corretto funzionamento di tutto. | |
|
| | |
bestlin
Numero di messaggi : 16
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : nicola angelino
Data d'iscrizione : 24.05.12
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano Sab Mar 12, 2016 5:54 pm | |
| peccato! comunque si aspettiamo che qualcun altro provi ad avviarlo per verificare se è un problema di versione del programma | |
|
| | |
ddefalco
Admin

Numero di messaggi : 172
Località : Napoli
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : Domenico de Falco
Data d'iscrizione : 29.12.08
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano Sab Mar 12, 2016 11:31 pm | |
| molto bene ragazzi, mi fa piacere che usate il forum per questo. | |
|
| | |
AlfonsoBisogno
Numero di messaggi : 2
Corso di appartenenza : Dinamica e Controllo dei Sistemi Meccanici
NomeCognome : Alfonso Bisogno
Data d'iscrizione : 30.09.15
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano Lun Mar 14, 2016 9:06 am | |
| bestlin ho scaricato la cartella da te pubblicata, l'ho fatto girare su matlab e mi dà i risultati da te pubblicati. Il problema è che finita la simulazione mi dava degli errori sulla funzione body. Non so se sono state delle modifiche effettuate da te sul codice o dall'ideatore stesso, comunque adesso il programma funziona bene e inoltre mi fà anche la simulazione in 3D dove si vede l'oscillazione del pendolo che varia nel tempo fino ad arrivare al totale arresto.
Posto il link con il contenuto:
https://www.dropbox.com/sh/orexjdbxcyehmyi/AABZVc3c7nXKeEU3SWCv41i5a?dl=0 | |
|
| | |
bestlin
Numero di messaggi : 16
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : nicola angelino
Data d'iscrizione : 24.05.12
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano Mar Mag 03, 2016 8:22 am | |
| Buon Giorno AlfonsoBisogno purtroppo anche a me da degli errori che non riesco ad eliminare nonostante la simulazione parti perfettamente. Oggi propongo un esercizio affrontato più volte a lezione, ossia il doppio pendolo, ho ritrovato un listato matlab che ci permette di effettuare una simulazione 3D attraverso il QuIRK.
Posto Il file .zip da estrarre in una cartella:
https://mega.nz/#!dBB0GD5C
il file da aprire direttamente da matlab è quello denominato: demo_DoublePendulum | |
|
| | |
bestlin
Numero di messaggi : 16
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : nicola angelino
Data d'iscrizione : 24.05.12
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano Mar Mag 03, 2016 8:23 am | |
| Per scaricare il file c'è bisogno della chiave di decrittazione che è la seguente:
!xb3kXkXfWp9yiLlbcdJZKqevIFKoXqQjTVw-FnEFXpc | |
|
| | |
bestlin
Numero di messaggi : 16
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : nicola angelino
Data d'iscrizione : 24.05.12
| |
| | |
ddefalco
Admin
Numero di messaggi : 172
Località : Napoli
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : Domenico de Falco
Data d'iscrizione : 29.12.08
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano Mar Mag 03, 2016 9:47 am | |
| molto bene ragazzi. anche se non capisco molto il disegno schematico del modello riportato. Inoltre anche il diagramma della risposta del modello andrebbe riportato in forma piu chiara. Ad esempio potrebbe essere opportuno fare 2 diagrammi in ognuno dei quali si riporti per ogni massa la velocità (sulle ordinate) in funzione dello spostamento (sulle ascisse) al variare del tempo, come è stato fatto ad esempio nell'esercizio riportato sul sito del corso [ clicca qui]. Saluti  | |
|
| | |
bestlin
Numero di messaggi : 16
Corso di appartenenza : Meccanica Applicata alle Macchine
NomeCognome : nicola angelino
Data d'iscrizione : 24.05.12
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano Gio Mag 05, 2016 8:37 am | |
| Buon giorno Professore, come già accennato, gli esercizi proposti sono listati ritrovati in rete. Analizzando tali esempi, insieme ad altri colleghi, cerchiamo di trarre utili informazioni riguardo la modellazione nonché la compilazione del metodo QuIRK, nonostante la sua complessità. Non riusciamo ancora a capire perfettamente i diagrammi della risposta, una parte di esso rappresenta sicuramente la variazione della posizione in funzione del tempo,quindi il moto. L'immagine riportata in verità non è proprio un disegno schematico ma è un screenshot di una vera è propria simulazione 3D, nell'ultimo esempio proposto il doppio pendolo è capovolto e la prima massa è assente o per meglio dire m1=0. L'esercizio da Lei proposto è molto interessante, purtroppo ho avuto dei problemi nel riportare tale esercizio in linguaggio matlab. I problemi principali sono stati: quello riguardante la derivazione delle equazioni di vincolo attraverso il metodo simbolico anche se utilizzando il Symbolic Math Toolbox ho fatti dei netti progressi, l'altro problema è quello del riordino dell'equazione di vincolo nella forma A x(duepunto)= b .  Risolti tali problemi non dovrebbe essere difficile realizzare tali diagrammi.  Saluti | |
|
| | |
Contenuto sponsorizzato
| | Titolo: Re: QuIRK Multibody Dynamics Esempio pendolo piano | |
| |
|
| | |
| | QuIRK Multibody Dynamics Esempio pendolo piano | |
|